This Toy Inspired Actuator Could Enable Robots To Jump
How many of you remember the toys that would spring up into the air after they had been pushed down by you? They are known as poppers and have led to the inspiration for an actuator that might one day enable soft-bodied robots to jump across rough terrain. The actuator is currently undergoing development at Harvard University.
The said actuator is comprised of two upside-down-bowl-shaped polymer caps. The larger of the two sits on top while the smaller one is placed inside of it. The two caps have a small air gap that exists between them and both of them have been joined together at the bottom – along the rims of the bowls.
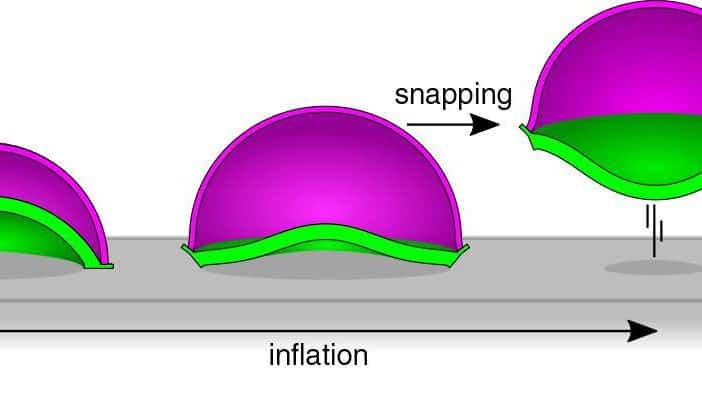
The actuator simply sits flat against the surface when not required. However, once a jump is needed; an integrated hose is utilized for pumping air into the gap between the two caps. The outcome of this act is an increase in the pressure that causes the bigger cap to expand upward. Simultaneously, the smaller cap buckles and expands downward. During this motion, it releases energy rapidly as it transforms from a concave to a convex shape. The process is known as shell buckling. Shell buckling forces the cap to hit the ground and thus catapult the entire actuator into the air.
Once the jump is executed, the air pressure gets released thus bringing the cap back into the actuator again. This simple technique could be used by robots that have been equipped with such actuators to jump repeatedly. Professor Katia Bertoldi who is a senior author of a paper on the research said, ‘This actuator is a building block that could be integrated into a fully soft robotic system to give soft robots that can already crawl, walk and swim the ability to jump. By incorporating our jumper into these designs, these robots could navigate safely through uncharted landscapes.’


