Soft Gripper Robots – Suitable for pick up delicate objects
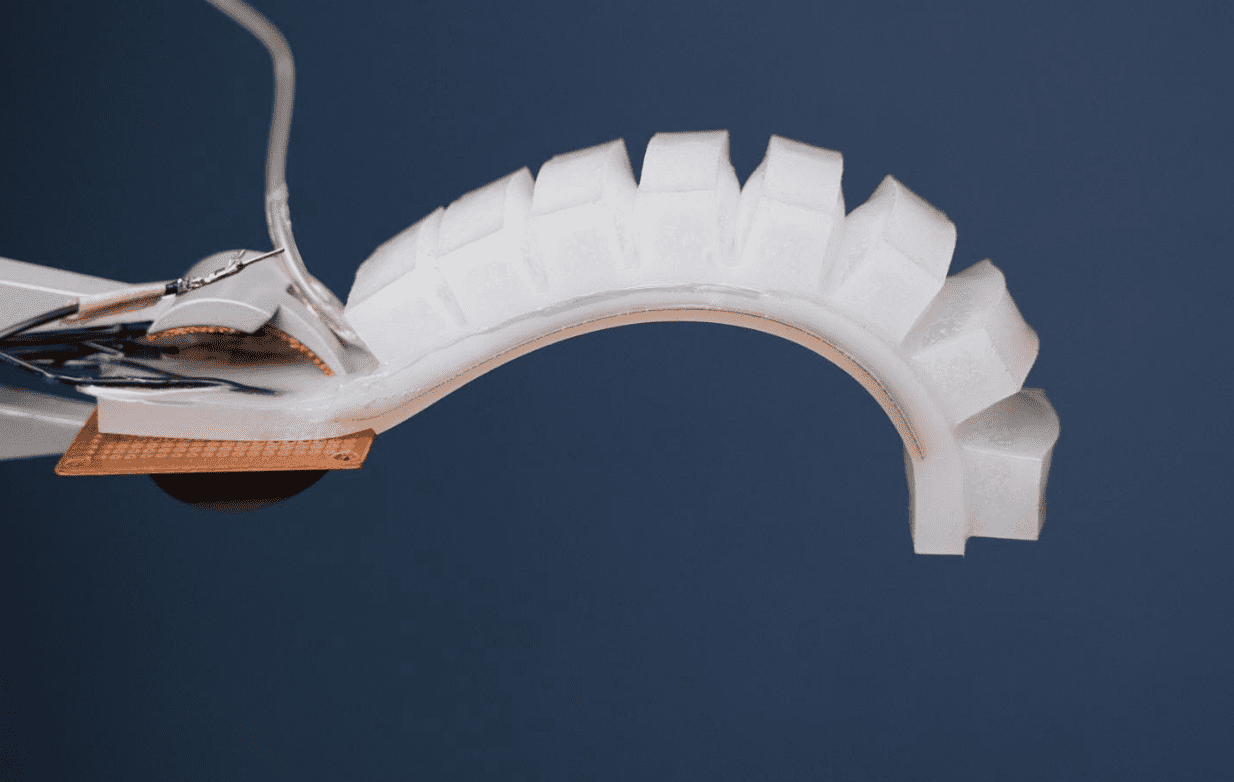
Robotics technology is making advances and rapid development. Soft Robotic is a sub-field of Robotics. It is made from highly compliant materials that are similar to those found in living organisms. It moves like living organisms and adapt to their surroundings.
The soft robots are made up of channels & chambers in an elastomer. This channel inflates by pressurization and that create motions. This motion is controlled by geometrical modifying of embedded chambers and its wall material properties. It is frequently powered by compressed air. The legs of soft gripper robots are mostly preferred in even number like 2, 4 & 6. There are a growing demand for new types of robotic end effector.
Fabrication steps.
The Fabrication steps are:
- Create a mould structure for a robot using a 3D printer.
- Poured soft material like silicon in the mold cavity of 3D printed structure and remove all parts of the mold after solidification of the material.
- Place solid material in face-down position on the new silicon layer and seal outer perimeter and let it solidify.
- Remove excess material and puncture robot with an air tube.
- Connect the squeeze bulb or compressed air unit.
Benefits:
- Maintain stability Through Absorbing Energy.
- Exhibit Physical Robustness.
- Safe To Operate For Humans.
- Low Cost.
- Internal Pressure Resists Buckling
- Distributes Stresses Throughout The Structure
- Motion Controlled By Compressed Air
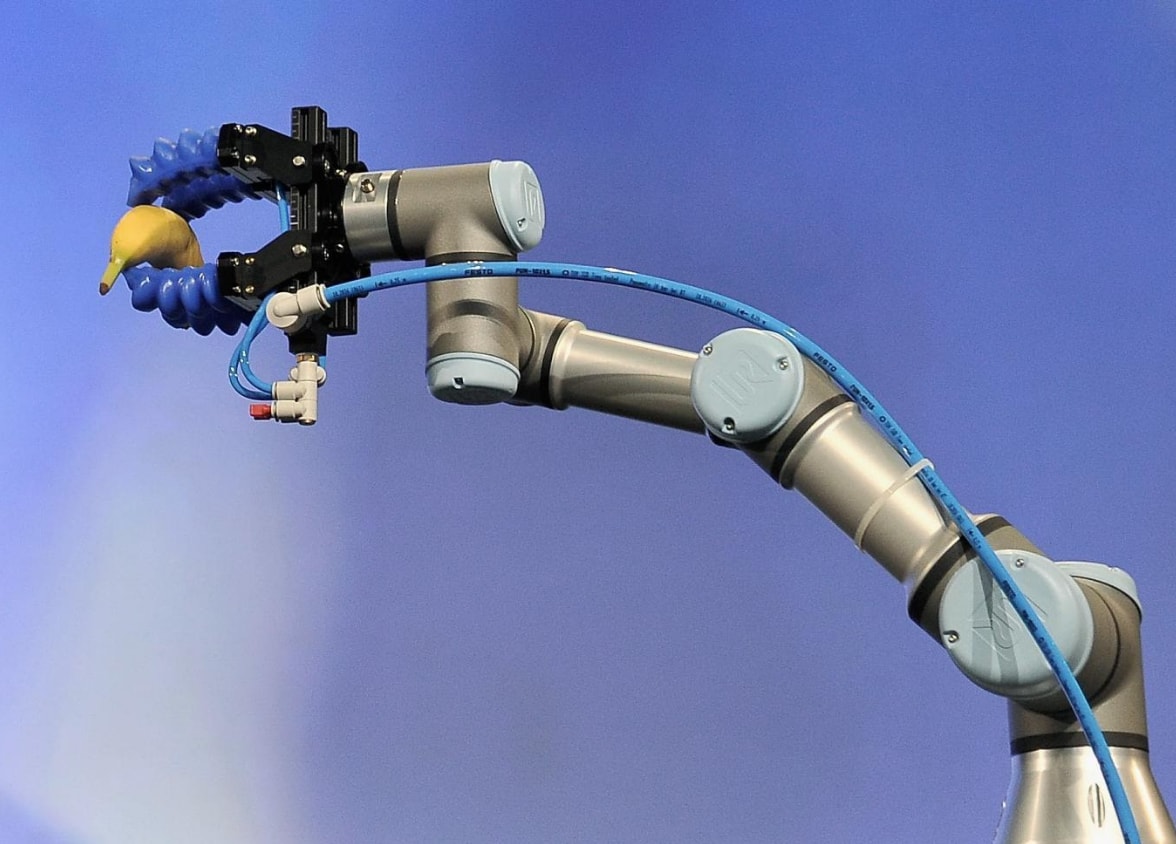
Application:
It is very useful in the assembly lines for handling objects and in warehouses, where objects have unpredictable size, shape and weight. In food packaging industries use for food handling where sanitation and delicate work is important and useful for food harvesting. Soft gripper robots are designed to do tasks where conventional robots are failing to do that task. It is also helpful in medical assistance as a grasping tool in Minimally Invasive Surgery. It works well in highly repetitive industrial and manufacturing operations. Soft Gripper Robots are adaptive, plug and play, repeatable and reliable solution. It is completely a future solution for handling delicate objects.


