Salto the Jumping Robot Can Now Execute Precision Landings Like a Gymnast
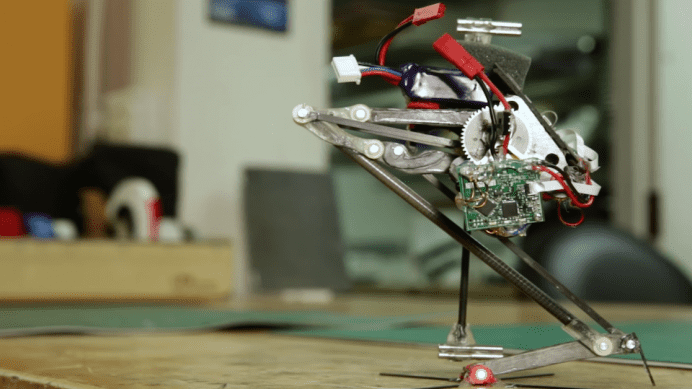
Now, in a new example of advances in robotics that hopefully won’t signal our impending doom via a Skynet-style robot uprising, Salto the jumping robot by UC Berkeley’s Biomimetics lab has shown that it can land a jump with stylish precision.
UC Berkeley Biomimetics lab’s robot Salto has been hopping with great agility since 2016. By 2018, it could hop so accurately that it was able to reach heights of up to a meter (3.3 ft), NewAtlas reported at the time. It could even autonomously bounce its way up obstacles like the main character in a certain platforming video game.
Strangely, the one thing Salto couldn’t do was land, meaning its impressive jumps were always punctuated by the odd sight of seeing the robot sprawled over on the floor like a figure skater that had failed their landing.
The way a gymnast sticks a landing when they have this amount of angular momentum is to take a step to keep their balance. However, this isn’t possible for Salto, as it is a one-legged hopping machine.
Because of this, “Salto’s landing angle must be very accurate, or the angular momentum will be too much for its reaction wheel tail to negate,” Yim explained. “Falling from 1 meter (3 feet), Salto only has about 2.3 degrees of wiggle room forwards and backwards if it is to stick its landing.”
The UC Berkeley team programmed their Salto robot to spin its reaction wheel tail in the same way someone landing on a beam or ledge will pinwheel their arms to keep balance when they can’t take a step forward.
In a test of 60 jumps, Salto fell over only three times, sat back on its “heel” five times, and made a perfectly controlled landing 52 times.
Such accuracy could help the UC Berkeley team to fulfill their original goal — to build a robot that can navigate difficult terrain and help humans in search and rescue missions.
The creators of this cute one-legged robot have taken a big leap towards achieving their goal of creating a viable search and rescue robot.


